現在の研究活動 : Study
1.力学半導体(衝撃制御)に関する研究
衝撃による力学的エネルギーが、衝撃を与える要素から衝撃を受ける要素へ一方的に伝達されるシステムを力学半導体といいます。この力学半導体に近いシステムをアクティブ制御により実現することをめざして研究しています(文献22,26)。さらに、この衝撃制御技術を応用して、肺と肋骨、脳と頭蓋骨の相対変位を許容値内に抑えるアクティブシートベルトを開発しています。これにより事故後の後遺症の発生率を低下させられるようになります(文献25)。
2.車の乗員保護装置(チャイルドシート等)に関する研究
衝撃制御の考え方を応用して、振り子・倒立振り子併用式チャイルドベッドを研究しています。車に乗せられている幼児の安全確保のため、振り子式のチャイルドベッドを倒立振り子のようにアームで支え、そのアームの回転減衰をセミアクティブ制御で調整することにより、衝突時の幼児に作用する衝撃力を徐々に大きくして許容値以下に抑える安全装置を開発しています。まず、数値シミュレーションにより基礎的なデータを集めて設計指針を得ると供に、提案しているシステムの有効性を確認してきました。衝突初期に衝撃力を緩和できる振り子式の特徴と動き出し難さから寝台の移動距離を抑えることのできる倒立振り子式の特徴を併せ持つ点、車上の装置であることから充分なエネルギー供給が得にくい状況を考慮してセミアクティブ制御により衝撃力を緩和する点が本装置の特徴です(文献32,38)。現在は、本学自動車工学棟に設置されている衝突実験装置の制御システムを構築、素早い応答が必要となる衝撃制御用のセミアクティブアクチュエータを試作し、チャイルドベッド模型を製作して実験により有効性を確認しています。チャイルドベッドの加速度を直接フィードバックする制御システムについて、その有効性を模型実験(文献40,42,44)とマルチボディダイナミクスソフトウエア:Adams によるシミュレーション(文献41)で確認した結果を報告しました。
<このテーマは、日本学術振興会 科学研究費(平成24年度~28年度)の補助を受けて実施しました。>
――> 台車の走行実験が見れます。 <<<実験の様子>>>(約3.7MBのMPEGムービー)
――> シミュレーションが見れます。 <<<シミュレーションの様子>>>(約3MBのMPEGムービー)
――> 制御実験風景が見れます。 <<<制御実験の様子>>>(約1.2MBのムービー)
さらに、ベッドを回転させて幼児に作用する力を常に寝台と垂直にすることで、幼児が左右に振られないようにするスピン制御についても下記の国際会議や(文献45)で発表しました。
◯ Takeshi Kawashima, Simulation Study on a Spin Control System for Semi-Active In-Car Crib with Joint Application of Regular and Inverted Pendulum Mechanisms,
The 9th Asian Conference on Multibody Dynamics, Shanghai Jiao Tong University, Xi'an, China (2018-8).
3.中立浮力式水中ロボットに関する研究
資源の乏しい日本において海洋開発は重要な研究課題です。しかし、水中は人間が活動するには厳しい環境であり、自動化が開発の鍵となっています。そこで、魚のように水中を自由に動きまわれ、かつ、あまり周囲の流れを乱さずに作業できる小型水中ロボットの開発をめざし、振動翼とリアクションホイールを用いた水中ロボットの研究をしています。従来は流体力として付加質量による慣性力および抗力が考えられてきましたが、本研究では周囲の流れを乱さず大きな力を得るために揚力を利用していることが特徴です(文献18)。
<<<<< 今までの研究も見てね! >>>>>
4.スライディングモード制御に関する研究
スライディングモード制御が入力に関して線形な非線形システムを手軽に扱えること、ロバスト性に優れていることに注目し、水中ロボットや加振台(文献31)などへの応用を研究しています。
倒立振子の振り上げから安定化までを1つのスライディングモード制御則により実現できる制御システムを開発、さらに、非線形モデルオブザーバを用いることで入力のチャタリングを抑えた制御が可能になることを実験により示しました(文献17)。
引き続き、多自由度倒立振子における振り上げと安定化を通じて非線形超平面の設計方法を研究しています。
(参考:川島、非線形モデルVSSオブザーバを用いたスライディングモード制御による倒立振子の振り上げと安定化、神奈川工科大学研究報告第23号)
また、優れた特性を有するスライディングモード制御ですが、ロバスト性を保つために入力が激しく変化するチャタリングが生じるという問題点を有しています。スライディングモード制御を普及させていくためにはチャタリングに対して強いアクチュエータの開発が不可欠と考え、研究を進めています。
<<<<< 今までの研究も見てね! >>>>>
5.振り子式自動車に関する研究
バスが曲がったり止まったりするときの揺れは立っている乗客にとって辛いものです。キャビンの傾斜を制御して、外力が常に床に対して垂直方向に作用するようにすれば足への負担は増えますが横に振られなくなり、乗り心地が向上します。また、トラックに積載する荷物の梱包に関しても、上下方向の強度のみ考慮すればよいことになり簡素化が可能となります。しかしこの制御をアクティブサスペンションなどのアクチュエータのみで実現するにはあまりにも大きなパワーが必要となります。そこで、鉄道で実用化されている振り子の原理を取り入れた振り子式自動車を提案、開発をめざしていますが、自動車の場合は鉄道と異なり軌道が確定していないために工夫が必要です。そこで第1段階として、救急自動車用振り子式寝台を開発しています(文献19)。
――> 実験が見れます。 <<<制御なし>>> <<<制御あり>>>
(約1.3MBのMPEGムービー:モデムでは時間がかかります。)
6.心地よい振動に関する研究
今までに蓄積されてきたノウハウを生かして、心地よくゆらぐ椅子、ベビーベッドなど、振動の良い面を引き出した製品を開発しています。
この研究により、日本機械学会 環境工学部門より「研究業績賞」をいただきました(文献20)。
さらに、揺られている人の心拍揺らぎに応じて揺れを変化させるアルゴリズムを構築し、その時々の状態に応じた揺れを創り出すアクティブロッキングチェアを開発しました。その揺れを解析した結果、人体の情報をフィードバックしているのみにもかかわらず心地よい揺れの特徴が波形に現れることが明らかになりました(文献23)。
現在は、振り子式かごを備えたベビーカーを提案、幼児に不快な揺れをアクティブコントロールにより排除した後、心地よい揺れを付加することで幼児に優しいインテリジェントベビーカーの開発も進めています(文献24,28)。
また、いろいろな振動や揺れを収集・解析して、人に”やさしい”揺れ・振動を特徴づけるキーワードを探すことに重点を置いています。特に、加速度波形の振幅と周期のゆらぎに注目しています(文献33,37)。
◯ 水口直己,川島豪、心地よい揺らぎに関する基礎研究(ウォーキングにおける体の揺れの周期揺らぎに関する周波数分析)、
第24回環境工学総合シンポジウム講演論文集(2014-11)、pp.36-39。
◯ 川島豪、心地よい揺らぎに関する基礎研究(人が心地よくなるように体を動かしている時の振幅ゆらぎに関する周波数解析)、
第26回環境工学総合シンポジウム講演論文集(2016-6)、pp.8-11。
◯ 小俣拓也,川島豪、心地よい揺らぎに関する基礎研究(グランドを周回歩行しているときの体の揺れに関する周波数解析)、
第28回環境工学総合シンポジウム講演論文集(2018-7)、pp.120-123。
◯ T. Kawashima and T. Omata, Frequency analysis on amplitude fluctuation of rhythms produced by walking monotonously on a track,
Proceedings of the International Workshop on Environmental Engineering 2019 (2019-6), pp.20-21.
また、 <<<<< 今までの研究も見てね! >>>>>
7.振動発生器を内蔵した椅子の振動パターンに関する研究
共同研究として、自動車のシートを振動させることでドライバに的確に注意や気付きを与える振動パターンを探しています。
◯ 小俣,豊田,森田,川島、振動発生器を内蔵した椅子の反応時間を因子分析結果、
第27回環境工学総合シンポジウム講演論文集(2017-7)、pp.123-135。
◯ 豊田,森田,川島、振動発生器を内蔵した椅子のケースに合わせた振動の組み合わせ(招待講演)、
第29回環境工学総合シンポジウム講演論文集(2019-6)、pp.1-4。
8.サーモサイホン制御システムの開発(太陽エネルギー研究開発センター関連)
広く分布しているがエネルギー密度が低い再生可能エネルギーを有効に活用し、二酸化炭素排出削減に貢献できるシステムを開発しています。現在のエネルギーの主流は何にでも使える電力ですが,お湯として利用するエネルギーも少なくありません。そこで、外部電源を使わずに屋根に設置された太陽熱コレクタで集熱した熱を1階の床下等に移動できるサーモサイホン(熱サイホン)に注目し、その問題点である間欠的な熱移動を外部動力を必要としない制御システムで解決し、太陽熱の有効利用を大きく推進させるシステムの研究に取り組んでいます。成果の一部は国際会議で発表しています(文献43,46,48,50)。なお本課題は、自然エネルギーの専門家である藤澤准教授、流体力学の専門家である川口助教との学内共同研究として実施しています。
◯ 川口,藤澤,成澤,川島、上部集熱式サーモサイホンに関する制御用モデルの構築、
第27回環境工学総合シンポジウム講演論文集(2017-7)、pp.299-302。
◯ 川口,藤澤,成澤,川島、上部集熱式サーモサイホンの不安定挙動に関する基礎研究、
第28回環境工学総合シンポジウム講演論文集(2018-7)、pp.334-337。
◯ 川口,藤澤,川島、上部集熱式サーモサイホンの動作特性、
第29回環境工学総合シンポジウム講演論文集(2019-6)、pp.217-220。
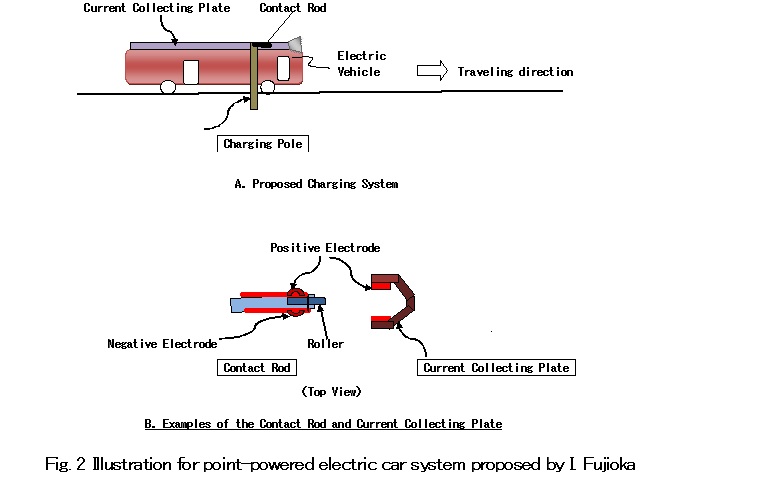
9.間歇給電式バスシステムに関する研究(太陽エネルギー研究開発センター関連)
太陽エネルギーは密度は低いですがどこにでも降り注いでいるので分散型発電に適しています。また、ソーラー発電による電力で電気自動車を走らせれば温室効果ガスの排出をなくすことができます。しかし、現在の技術では重いバッテリーによる重量とコスト増が避けられません。提案しているシステムは、都市に分散している停留所に注目し、周辺のソーラーパネルで発電された電力を蓄えてバスに給電する給電型バス停と、次のバス停までの電力のみを蓄える少量のバッテリーを搭載し、バス停ごとに受電していく集電装置付き電気バスよりなる新交通システムで、環境にやさしいことが特徴です。提案しているバスシステムのワンボックスカーによる実証実験と共にシミュレータの開発を行っています(文献27,29,34,35,36,39)。
<このテーマは、文部科学省「ハイテク・リサーチ・センター整備事業」(平成19年度~23年度)の補助を受けて実施しました。>
――> 実験が見れます。 <<<実験の様子>>>(約4.8MBのMPEGムービー)
(16:9のワイド画像なので4:3の通常画面で見ると左右が少し圧縮されます)
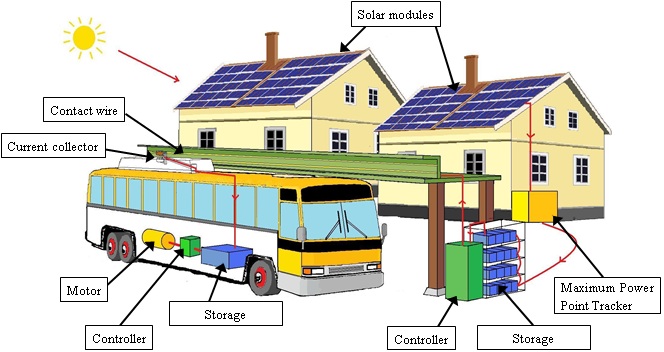
Fig. 1 Proposed Public Transportation System (Electric Bus Quickly Charged at Every Bus Stop)